

Los servomotores son una gran ayuda cuando queremos implementar un proceso que requiere fuerza de levantar algo, tomar un objeto, incluso mover algo a tal grado.
hay muchas formas de controlar un servomotor, ya que se comunica por medio de PWM ( Modulo de Ancho de Pulso), donde la frecuencia tiene un cambio anormal, pero si duda es fácil de escribir una señal PWM con cuanquierl lectura analógica o ya automatizado.
descarga los archivos
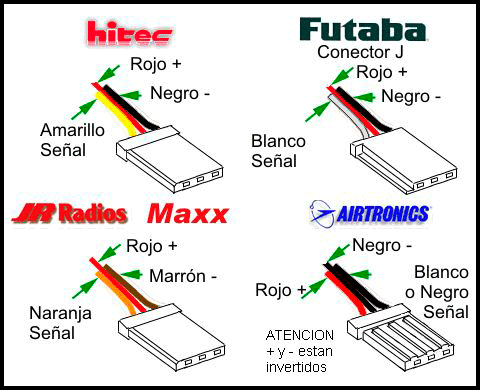
Conexiones de los servomotores(cables)
Analógico
/*controlador de ServoMotor con cualquier sistema analógico,
en este caso un potenciometro.
Creado por Art Banshee*/
int PWM11 = 11;
void setup(){
//no lo necesitamos.
}
void loop(){
int posicion = analogRead(A0)/4; //conversion a PWM
analogWrite(PWM11,posicion); //posición del servo.
/*recordar que va dependiendo del servomotor
si posee un servomotor de 360° dará solo una vuelta,
debe usar el potenciometro a la mitad para que gire los
180°, de lo contrario puede dañar el servomotro.*/
}

Automatizado con la librería del Servo en Arduino
/*control de servomotor ya automatizado, solo agregando
las posiciones.
Creado por Art Banshee*/
#include <Servo.h>
Servo servo1; //nombramos a nuestro servo
void setup(){
servo1.attach(11); //declaramos la salida del servo
}
void loop(){
servo1.write(90);
/*escribimos los grados del servo,
en este caso le diremos que se
posicione en los 90°*/
}